
Bev 车道标注方案及复杂车道线解决
文章目录
-
- 1. 数据采集方案
-
- 1.1 传感器方案
- 1.2 数据同步
- 2. 标注方案
-
- 2.1 标注注意项
- 2.2 4d 标注(时序)
-
- 2.2.1 4d标签制作
- 2.2.2 时序融合的作用
-
- 2.2.2.1 时序融合方式
- 2.2.2.2 时序融合难点
- 2.2.2.2 时序实际应用情况
- 3. 复杂车道线解决
-
- 3.1 split 和merge车道线的解决
- 3.2 大曲率或U形车道线的解决
-
- 3.2.1 u形或者环岛线解决 (特别大的弯道)
-
- 3.2.1.1 优化标注去解决
- 3.2.1.1 模型层面去解决
- 3.2.2 一般的大曲率弯道
- 3.2.2.1 优化1:分割的方案
- 3.2.2.2 优化2:增强大曲率弯道的特征表达
1. 数据采集方案
1.1 传感器方案
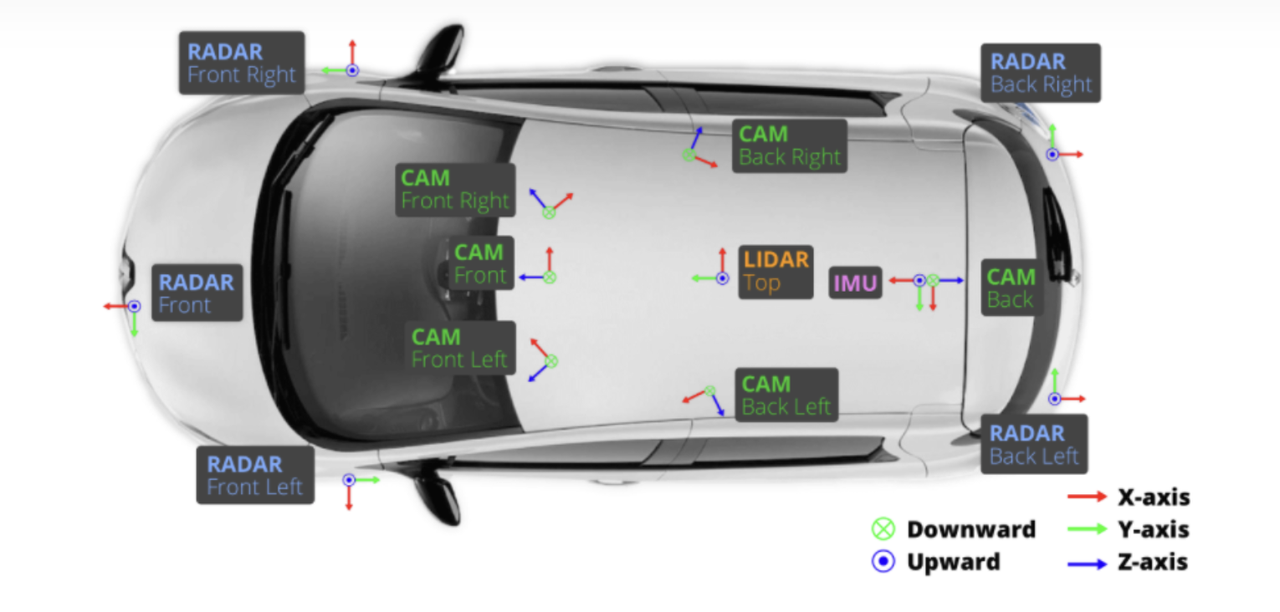
传感器布置: 6个 camer + 1个lidar +4路鱼眼, 或者前视还有1路窄角 + 1路广角。 现在基本上都是行泊一体的方案,泊车需要利用鱼眼相机, 正常相机在自车周围会有一圈盲区,是看不到的,由于泊车需要看到自车附近的区域所以需要用到鱼眼相机,鱼眼可以看到自车附近的区域。
1.2 数据同步
数据通过激光雷达和相机共同去采集,激光lidar的频率会很高,相机的频率会低一些。需要做相机和lidar的时间戳对齐,因为相机和lidar传感器之间是有时间的gap的。对齐可以分为两种:
- (1) 硬对齐:就是相机和lidar传感器之间需要同步曝光,这样他们两者采集的数据就不需要去做时间戳的对齐
- (2) 软同步:相机和lidar 传感器不是同步曝光的,需要软对齐,通常用最近邻的时间去匹配相机和lidar的数据。
2. 标注方案
- 合流车道线(merge) : 车道线由二变一
- 分流车道线(split): 车道线由一变二
- 合流点: 车道线由二变一的分界点( 采样点标注
免责声明:我们致力于保护作者版权,注重分享,被刊用文章因无法核实真实出处,未能及时与作者取得联系,或有版权异议的,请联系管理员,我们会立即处理! 部分文章是来自自研大数据AI进行生成,内容摘自(百度百科,百度知道,头条百科,中国民法典,刑法,牛津词典,新华词典,汉语词典,国家院校,科普平台)等数据,内容仅供学习参考,不准确地方联系删除处理! 图片声明:本站部分配图来自人工智能系统AI生成,觅知网授权图片,PxHere摄影无版权图库和百度,360,搜狗等多加搜索引擎自动关键词搜索配图,如有侵权的图片,请第一时间联系我们,邮箱:ciyunidc@ciyunshuju.com。本站只作为美观性配图使用,无任何非法侵犯第三方意图,一切解释权归图片著作权方,本站不承担任何责任。如有恶意碰瓷者,必当奉陪到底严惩不贷!



