
国产操作系统Galaxy Kirin v10的上手体验能否赶上Windows 7?
温馨提示:这篇文章已超过488天没有更新,请注意相关的内容是否还可用!
国产桌面操作系统发展至今,诞生了几个比较大的厂商。除了Bago之前推出的deepin()和UOS()之外,另一家操作系统厂商麒麟软件出品的Galaxy Kirin V10也拥有大量用户。数量多,是党政和金融XC采购的常客。Bago此前已经推出了其社区版本UQilin(),感兴趣的朋友可以查看一下。今天巴格给大家带来国产桌面操作系统银河麒麟V10的体验分享。至于国产桌面操作系统的发展水平以及距离Windows还有多远,那就是见仁见智了。Galaxy Kirin v10系统的整体设计风格更像是windows7,与uos有较大不同。Galaxy Kirin v10 软件商店中没有 Android 软件专区。总体来看,Galaxy Kirin v10和Ubuntu Kirin的系统功能完成度比较一致。
国产桌面操作系统发展至今,诞生了几个比较大的厂商。 除了Bago之前推出的deepin()和UOS()之外,另一家操作系统厂商麒麟软件出品的Galaxy Kirin V10也拥有大量用户。 数量多,是党政和金融XC采购的常客。 Bago此前已经推出了其社区版本UQilin(),感兴趣的朋友可以查看一下。
今天巴格给大家带来国产桌面操作系统银河麒麟V10的体验分享。 大家可以和我之前介绍deepin和uos之前写的几篇文章对比一下,看看自己更喜欢哪一种国产操作系统。 至于国产桌面操作系统的发展水平以及距离Windows还有多远,那就是见仁见智了。 每个人都可以自由表达个人意见。
接下来,大家就跟随巴哥一起来看看银河麒麟v10的系统功能、操作体验以及软件生态。 如果朋友想体验安装,可以参考之前发布的虚拟机安装Ubuntu Kylin的方法()。 整体操作流程是一样的。
1、系统登录:
系统登录界面比较简单,只需输入密码即可登录。如果设置了多个登录账户,可以切换登录账户进行登录:

2、系统桌面:
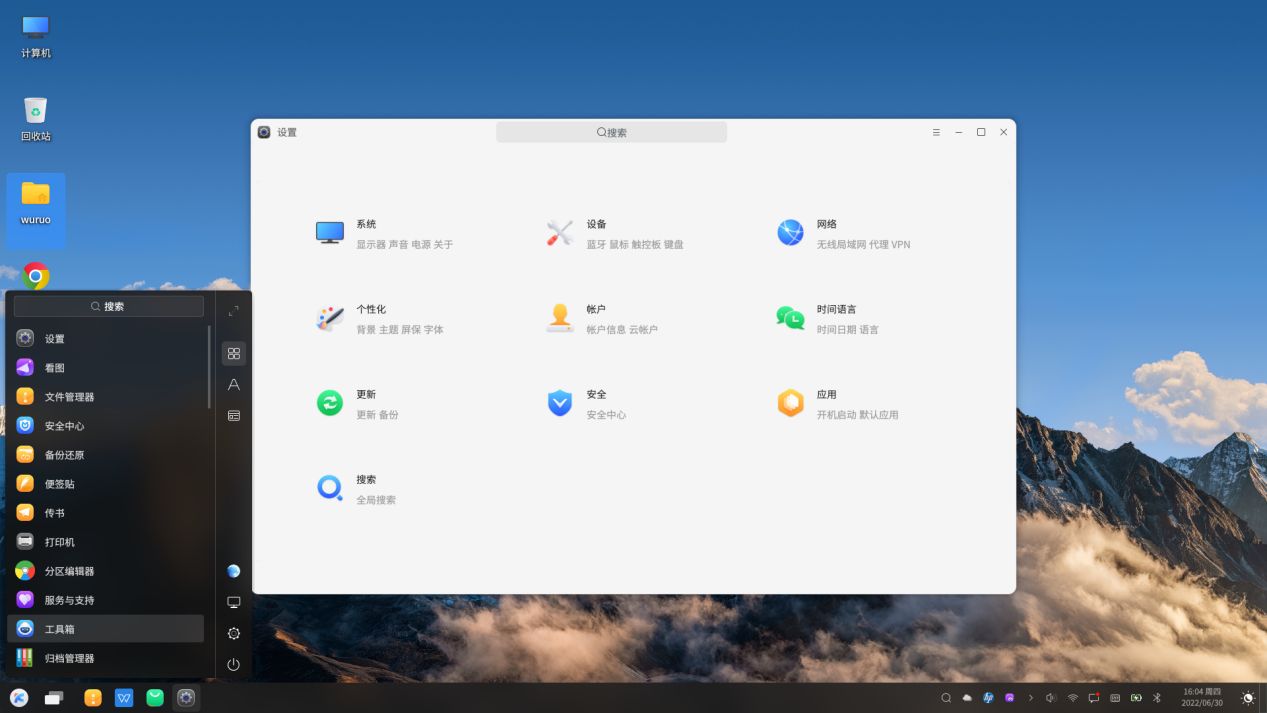
Galaxy Kirin v10系统的整体设计风格更像是windows7,与uos有较大不同。 对于熟悉Windows的用户来说,银河麒麟v10可能会感觉比较熟悉,尤其是桌面上的任务栏和电脑、回收站等图标的功能区域设置,与win7非常相似。 启动菜单风格也和win7类似。 没有像win10那样的动态磁贴。 该列表显示系统上安装的所有应用程序。

该系统还提供了一种全屏查看应用程序的方式。 展开后,它看起来就像一个大平板电脑。 所有应用程序图标均布局在桌面上,并支持按类别和字母排序。

右键单击任务栏,弹出常用的功能设置,包括调整任务栏的大小和位置(上、下、左、右)等:

在桌面上点击鼠标右键,会弹出常用的右键菜单,与Windows的体验逻辑类似:

3. 系统设置
Galaxy Kirin v10提供了丰富的系统设置功能,与Ubuntu Kirin基本相同,包括显示设置、设备管理、个性化设置、网络设置、账户设置、更新管理等,比较全面:


4. 预装应用程序
与同芯UOS相比,银河麒麟v10预装了一些第三方软件,包括常用的金山WPS、搜狗输入法、360安全浏览器等,开箱即可使用。 不过预装的WPS2019好像是专业版,需要序列号才能使用。 可以在wps官网下载Linux wps个人版,免费。



5、软件生态

Galaxy Kirin v10 带有自己的软件商店。 商店里可以看到很多软件工具,包括金山WPS、微信、QQ、腾讯文档等,与UOS可以支持的软件基本类似。 毕竟,它们都是 Linux 生态系统:


银河麒麟v10商店还列出了很多官方适配的驱动,我觉得还是比较不错的。 很多朋友在后台留言反映,对于国产操作系统的驱动适配存在很大问题,很多驱动无法使用。 ,麒麟的想法还是不错的。

6. 运行Windows软件
Galaxy Kirin v10的软件商店没有Windows软件分区,也没有像同心那样标明该软件是否是Windows兼容版本。 但Bago在Galaxy Kirin上看到了跨界软件,它可以像wine一样兼容运行Windows的exe软件。 由于时间关系,今天就不做过多介绍了。 我有机会单独测试一下在Kirin v10上运行windows exe程序的体验:

7.运行Android应用程序
Galaxy Kirin v10 软件商店中没有 Android 软件专区。 Bago尝试使用关键字“抖音”进行搜索,但找不到该应用程序的Android版本,只有网页版本。 不知道是系统不支持还是Starling安装的版本有问题。 我稍后会调查一下。

总体来看,Galaxy Kirin v10和Ubuntu Kirin的系统功能完成度比较一致。 从软件生态来看,Linux版本的软件生态与UOS类似。 Windows软件和Android软件的兼容性与联通存在一定差异。 当然,也可能是这样。 是测试版的问题。 如果有朋友有其他版本的麒麟v10操作系统,可以私信Bago,我会审核的。
巴格认为,deepin、uos、Ubuntu Kirin或者Galaxy Kirin v10都是目前情况下中国制造的一些比较优秀的国产操作系统。 其中uos和银河麒麟v10是商业版本,XC领域已经有很多。 用户正在使用,未来能发展到什么程度,值得期待!
摘要:提出一种用于机器人跟踪控制的神经网络自适应滑模控制策略。 该控制方案将神经网络的非线性映射能力与滑模变结构和自适应控制相结合。 针对机器人中的不确定项,通过RBF网络进行自适应补偿,通过滑模变结构控制器和自适应控制器消除逼近误差。 同时基于李亚普诺夫理论保证机器人手轨迹跟踪误差逐渐收敛于零。 仿真结果验证了该方法的优越性和有效性。
关键词:不确定机器人; 神经网络; 自适应控制
在机器人跟踪控制研究中,机器人系统不可避免地由于建模误差而存在不确定性。 由于机器人存在的非线性和不确定性,为了解决这些问题,一些变结构方案[1]和自适应方案[2]相继被提出。 近年来,神经网络在机器人智能控制中得到了广泛的应用。 参考文献[3]提出了一种针对不确定系统的神经网络自适应学习,但该解决方案只能保证系统最终一致且有界。 参考文献[4]提出了一种神经网络来学习系统不确定性,但需要精确的机器人动力学模型。
为了解决上述问题,本文提出一种新型神经网络自适应滑模变结构控制器。 针对机器人中的不确定项,利用神经网络自适应学习各种非线性,通过变结构和自适应控制消除逼近误差。 这种控制器可以加快控制前期的跟踪速度,并且具有良好的鲁棒性。
1 提出问题
考虑 n 关节机器人的动力学方程 [5, 8]:



本文提出一种利用RBF网络对不确定项进行单独逼近并与滑模变结构和自适应控制相结合的控制策略,并构造Lyapunov函数来验证系统轨迹跟踪的稳定性。 采用滑模变结构和自适应控制方案来补偿神经网络的逼近误差,比传统神经网络具有更好的动态特性和鲁棒性。
参考
[1] DOULGERI Z. 机器人机械臂非线性鲁棒控制器的滑动机制[J]. IEE 论文集控制理论与应用,1999,146(6):493-498。

[2] COLBAUGH R,GLASS K。仅使用位置测量的刚性机械臂的自适应跟踪控制[J]。 机器人与系统学报, 1997, 14(1): 9-26。
[3] KIM YH, LEWIS F L. 机器人机械臂的神经网络输出反馈控制[J]. IEEE 机器人与自动化汇刊,1999,15(2):301-309。
[4] CILIZ M K. 基于神经网络的摩擦不确定性补偿的机器人机械臂自适应控制[J]. 机器人,2005,23:159-167。
[5]张文辉,齐乃明. 自适应神经变结构机器人轨迹跟踪控制[J]. 控制与决策,2011,26(4):597-601。
[6] 孙涛,裴海龙. 基于神经网络的机器人机械臂滑模自适应控制[J]. 神经计算,2011,74:2377-2384。
[7] 卢勇,刘建坤. 机器人控制系统中RBF神经网络执行器非线性补偿[C]. IMACS 系统应用计算工程多场会议,2006 年。
[8]牛玉刚,杨成武. 基于神经网络的不确定机器人自适应滑模控制[J]. 控制与决策,2001,16(1):79-83。



