
ROS2安装ORB—SLAM3并用电脑摄像头运行
安装环境: Ubuntu22.04 ros2 humble
安装参考链接
- 一、安装ORB-SLAM3(ROS2安装ORB-SLAM3的前提)
- 1、准备工作
- 1.1安装依赖
- 1.2源码下载
- 2、安装Eugen3
- 3、安装 Pangolin
- 4、安装opencv4.4.0
- 5、安装ORB-SLAM3
- 5.1 打开 ORBSLAM3 可视化选项(可选)
- 5.2 安装方法
- 6、数据集下载,测试
- 二、ROS2安装ORB-SLAM3
- 1、编译ORB-SLAM3-ROS2
- 2、安装摄像头驱动 usb_cam
一、安装ORB-SLAM3(ROS2安装ORB-SLAM3的前提)
1、准备工作
1.1安装依赖
sudo apt install git cmake gcc g++ mlocate
1.2源码下载
原版本:ROB-SLAM3源码下载
修改版本:
下面链接是适用ROS2的ORB-SLAM3修改版ORB-SLAM3-STEREO-FIXED,本文下载的是此版本
ORB-SLAM3-STEREO-FIXED下载
2、安装Eugen3
sudo apt-get install libeigen3-dev
3、安装 Pangolin
原博客说使用0.6,但实测报错,而且没找到相关解决方案,最后使用如下版本
https://github.com/stevenlovegrove/Pangolin
# 安装 mkdir build cd build cmake .. make -j4 sudo make install #测试 ## pangolin→examples→HelloPangolin cd Pangolin-master/examples/HelloPangolin mkdir build cd build cmake .. make # 直接运行./HelloPangolin可能会报错: #./HelloPangolin: error while loading shared libraries: libpango_windowing.so: # cannot open shared object file: No such file or directory #先运行如下指令 sudo ldconfig ./HelloPangolin
出现方块即安装成功
4、安装opencv4.4.0
参考博客:https://www.cnblogs.com/xiaoaug/p/17766112.html
opencv4.4.0下载地址
opencv_contrib4.4.0下载地址
主目录新建 opencv 文件夹,把上面解压的 2 个文件夹放入 opencv 文件夹内。
下载缺少的文件:https://wwtt.lanzouw.com/if60o1cwvv4h 密码:d5fx
下载完成后解压,将里面的十几个文件放到 opencv_contrib-4.4.0/modules/xfeatures2d/src 文件夹内。
修改 opencv_contrib-4.4.0/modules/xfeatures2d/test/test_features2d.cpp 文件,将里面的第 51~52 行代码路径改为:
#include "../../../../opencv-4.4.0/modules/features2d/test/test_detectors_regression.impl.hpp" #include "../../../../opencv-4.4.0/modules/features2d/test/test_descriptors_regression.impl.hpp"
修改 opencv_contrib-4.4.0/modules/xfeatures2d/test/test_rotation_and_scale_invariance.cpp 文件,将里面的第 7~8 行代码路径改为:
#include "../../../../opencv-4.4.0/modules/features2d/test/test_detectors_invariance.impl.hpp" // main OpenCV repo #include "../../../../opencv-4.4.0/modules/features2d/test/test_descriptors_invariance.impl.hpp" // main OpenCV repo
终端输入
sudo apt update && sudo apt install -y cmake g++ wget unzip cd opencv mkdir -p build && cd build cmake -DOPENCV_EXTRA_MODULES_PATH=../opencv_contrib-4.4.0/modules ../opencv-4.4.0 make -j4 sudo make install
编译可能出现如下错误
opencv/modules/gapi/test/gapi_async_test.cpp:448:26: error: ‘sleep_for’ is not a member of ‘std::this_thread’
448 | std::this_thread::sleep_for(std::chrono::milliseconds{2});
| ^~~~~~~~~
 解决方案
解决方案找到gapi_async_test.cpp 和test_precomp.hpp,在程序开头加上
#include
编译通过
5、安装ORB-SLAM3
5.1 打开 ORBSLAM3 可视化选项(可选)
到之前下载的ORB-SLAM3源码文件下
打开 Examples/Monocular 文件夹下的 mono_euroc.cc 文件,找到第 83 行:
ORB_SLAM3::System SLAM(argv[1],argv[2],ORB_SLAM3::System::MONOCULAR, false);
将最后的 false 改为 true。
5.2 安装方法
#这里我直接使用官方的方法,可以安装成功 cd ORB_SLAM3 chmod +x build.sh ./build.sh
6、数据集下载,测试
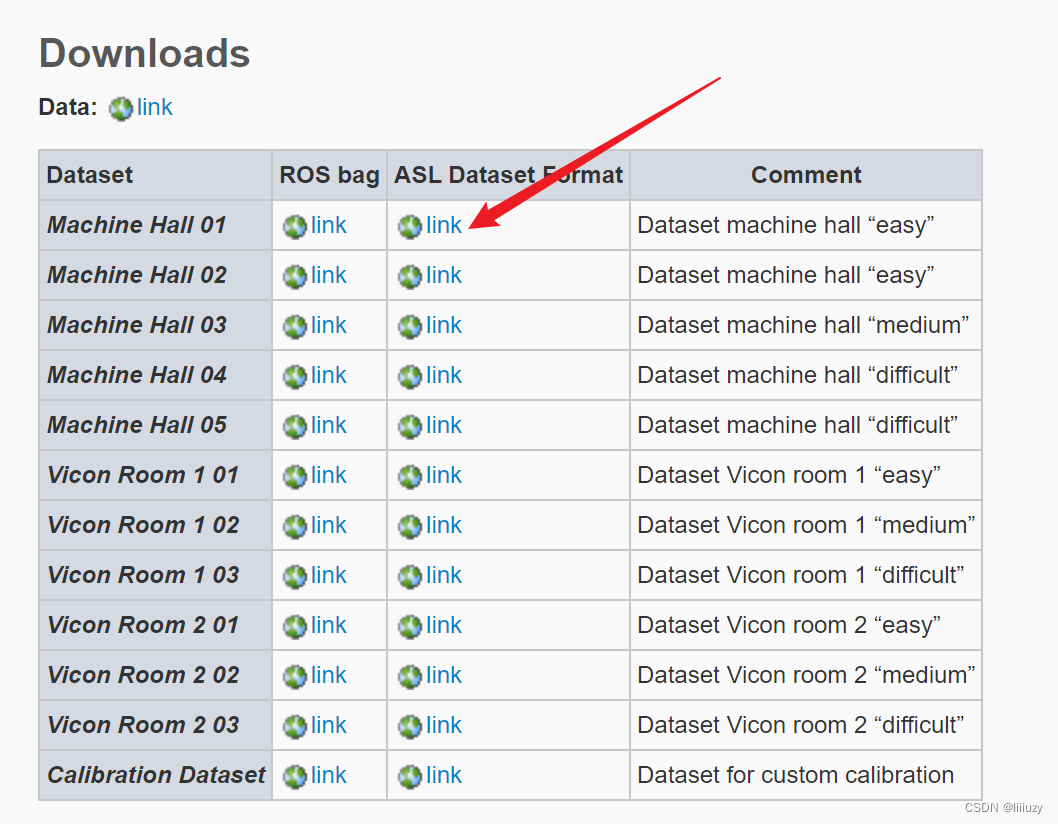 下载完成后,解压压缩包,里面有一个 mav0 的文件夹。
下载完成后,解压压缩包,里面有一个 mav0 的文件夹。然后在你的文件夹下(随便哪里,只要你能找到),创建一个文件夹叫 dataset。在 dataset 文件夹下再创建一个 MH01 文件夹,然后把刚才下载的 mav0 文件夹放到 MH01 里面去。
然后打开终端,进入 ORBSLAM3 文件夹内,执行测试:
**将最后一行指令中的 /home/xiao/dataset/MH01 改成你的 MH01 文件夹的地址。
cd ORB_SLAM3 cd Examples ./Monocular/mono_euroc ../Vocabulary/ORBvoc.txt ./Monocular/EuRoC.yaml /home/xiao/dataset/MH01 ./Monocular/EuRoC_TimeStamps/MH01.txt
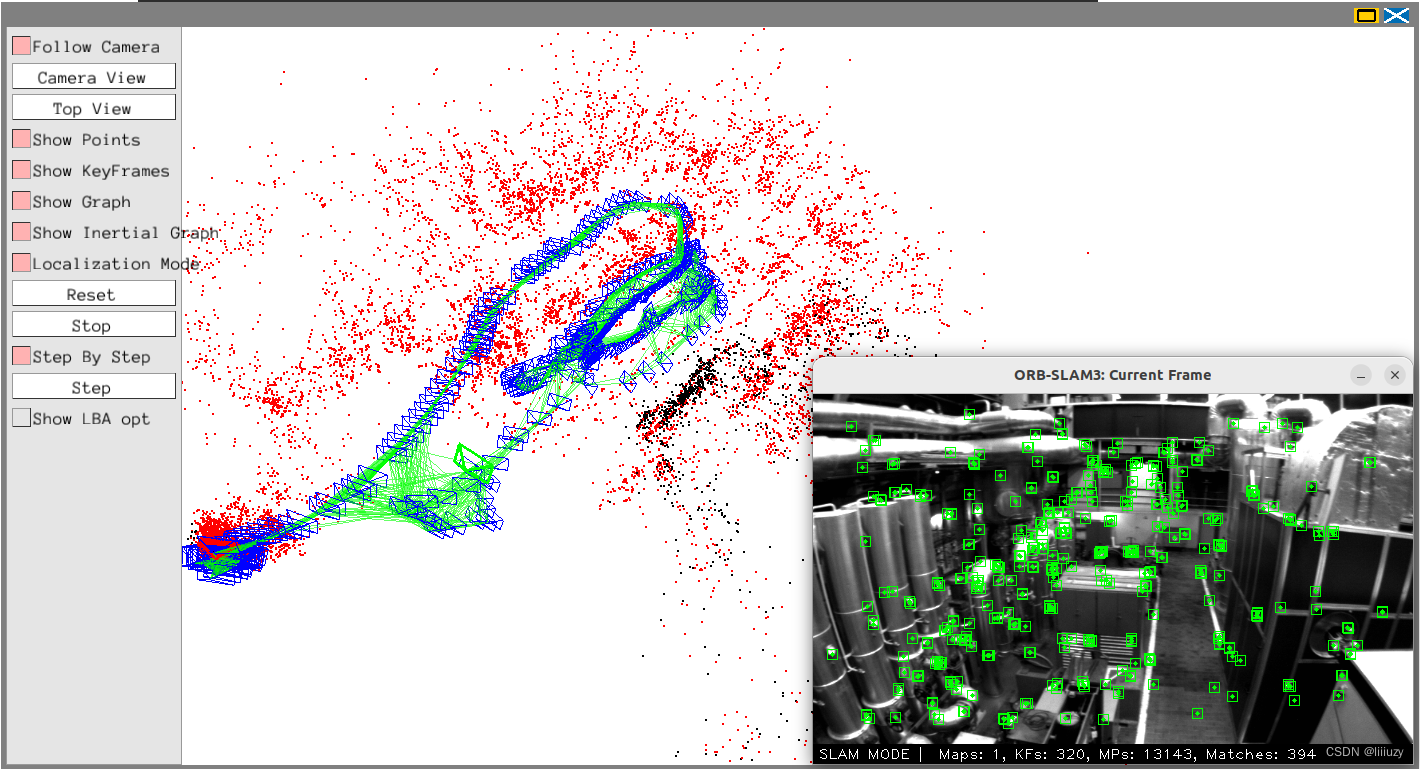 出现说明安装成功,至此ORB-SLAM3安装完毕,接下来把它在ros2中跑起来
出现说明安装成功,至此ORB-SLAM3安装完毕,接下来把它在ros2中跑起来二、ROS2安装ORB-SLAM3
1、编译ORB-SLAM3-ROS2
ROS2版ORB-SLAM3下载地址**我这里是humble版本
1、安装ros2依赖 sudo apt install ros-$ROS_DISTRO-vision-opencv && sudo apt install ros-$ROS_DISTRO-message-filters 2、新建工作空间 mkdir -p colcon_ws/src cd ~/colcon_ws/src git clone https://github.com/zang09/ORB_SLAM3_ROS2.git orbslam3_ros2 # 我是直接下载的源码 3、修改 CMakeLists.txt,将第 5 行代码里的路径修改为你自己本机 ROS2 site-packages 的路径 set(ENV{PYTHONPATH} "/opt/ros/humble/lib/python3.10/site-packages") 4、修改 CMakeModules/FindORB_SLAM3.cmake,将第 8 行代码里的路径修改为你自己本机安装的 ORB_SLAM3 的路径 set(ORB_SLAM3_ROOT_DIR "/home/lzy/colcon_orb_slam3/src/ORB_SLAM3") 5、编译 cd ~/colcon_ws colcon build --symlink-install --packages-select orbslam32、安装摄像头驱动 usb_cam
github下载地址
1、创建 usb_cam 工作空间: cd ~ mkdir -p usb_camera/src ## 有教程说需要安装依赖,我没有安装实测也没有问题,直接开始编译 2、编译 cd ~/usb_camera colcon build source install/setup.bash source ~/.bashrc 3、运行usb_cam,注意后面选择自己的代码路径; 这里的params_1.yaml 是摄像头配置参数,可设置帧数,图像大小等。 ros2 run usb_cam usb_cam_node_exe --ros-args --params-file /home/lzy/usb_camera/src/usb_cam-ros2/config/params_1.yaml 4、查看发布的图像,以下两种都行,出现图像则说明图像发布成功 方法一:(这个方法在我的电脑上非常卡顿) ros2 run rqt_image_view rqt_image_view 方法二: rviz2 在Add中订阅/image_raw话题中的image
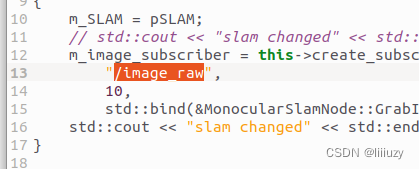
5、修改orb-slam3-ros2代码,把发布的图像放到算法中
修改/colcon_ws/src/ORB_SLAM3_ROS2-humble/src/monocular/monocular-slam-node.cpp的代码为/image_raw
6、重新编译文件
cd ~/colcon_ws colcon build --symlink-install --packages-select orbslam3
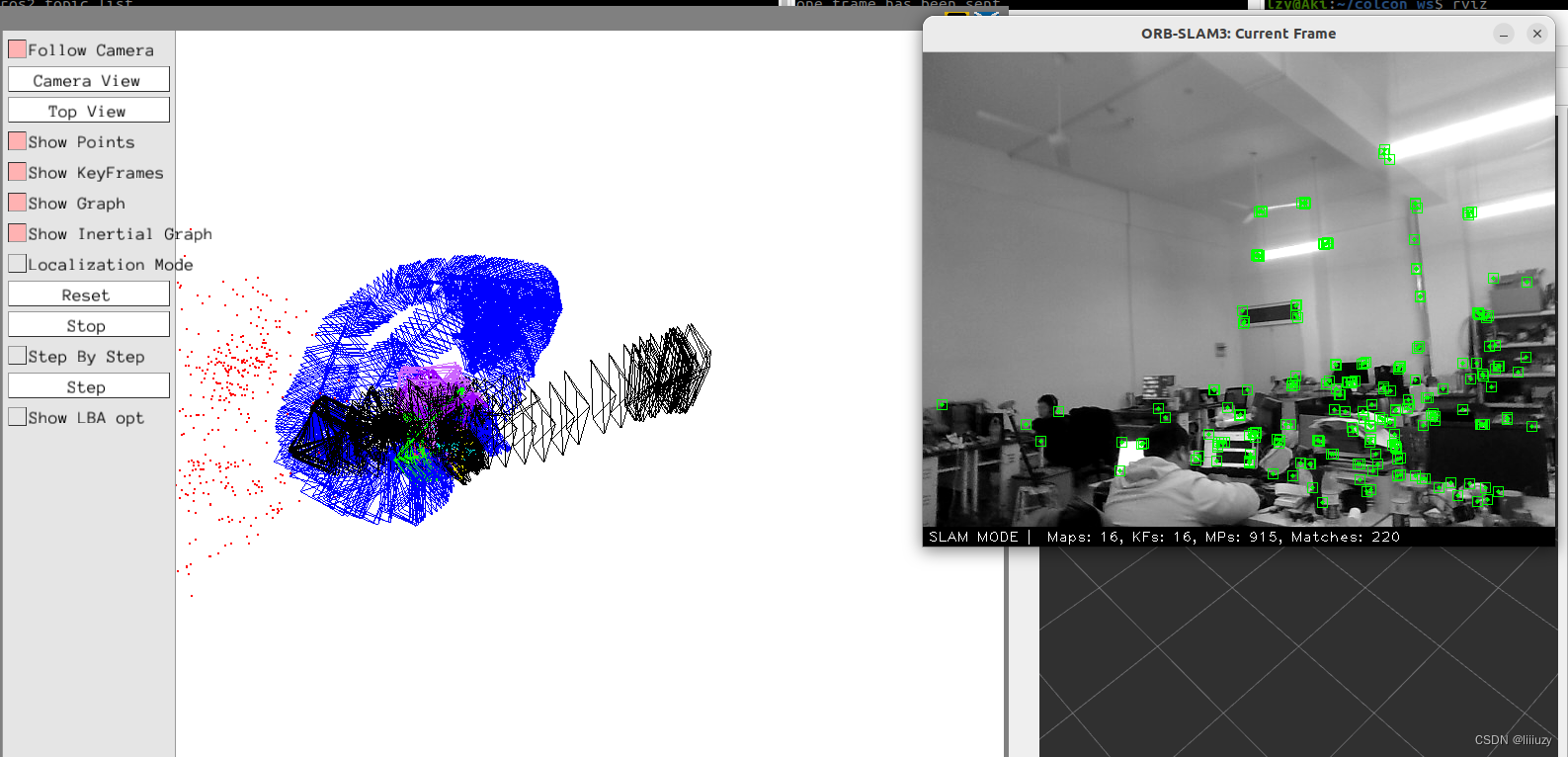
7、运行程序
ros2 run orbslam3 mono /home/lzy/colcon_orb_slam3/src/ORB_SLAM3/Vocabulary/ORBvoc.txt /home/lzy/colcon_orb_slam3/src/ORB_SLAM3/Examples/Monocular/TUM1.yaml
 若长时间卡在
若长时间卡在Loading ORB Vocabulary. This could take a while…
[ros2run]: Killed
原因可能是标定文件地址错误



