
【机器人学】2-1.六自由度机器人运动学逆解【附MATLAB机器人逆解代码】
通过上一篇文章六自由度机器人正解已经获得了机器人各连杆间的转换关系。当知道各个连杆的转角1、
2、
3、
4、
5、
6时可以求出末端执行器的位姿,这个过程称为正向运动学。这篇文章将讨论逆向运动学,即,给定末端执行器的位姿,求解各连杆的转角。在实际生活中逆向运动学更为实用。
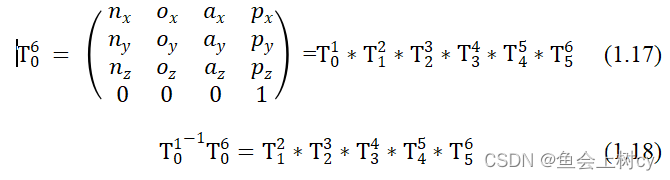
现已知末端姿态矩阵和机器人的运动学模型,求解1、
2、
3、
4、
5、
6。
已知六轴机器人的D-H参数如下所示:
如果不清楚何为改进的DH参数,可以看我的上一篇博客。【机器人学】1-1.六自由度机器人运动学正解 【附MATLAB代码】
| 关节1 | 关节2 | 关节3 | 关节4 | 关节5 | 关节6 | |
| 0 | 90 | 0 | 0 | -90 | 90 | |
| a | 0 | 0 | 425 | 393 | 0 | 0 |
| d | 160.7 | 0 | 0 | 113.3 | 99 | 93.6 |
| 0 | 90 | 0 | -90 | 0 | 0 | |
| 0 | 0 | 0 | 0 | 0 | 0 |
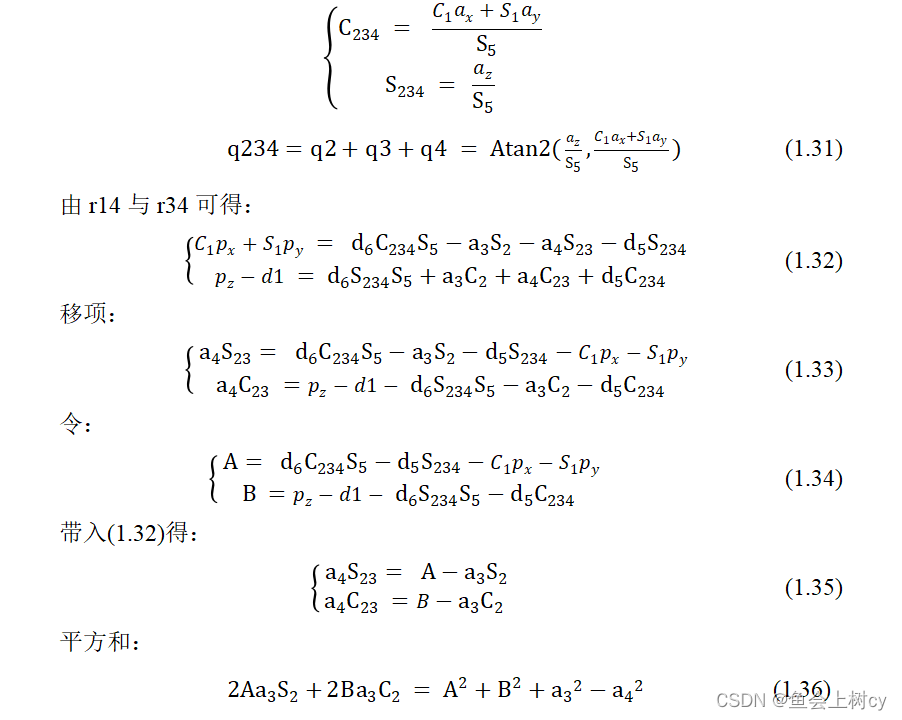
选用改进型的D-H参数,各矩阵分别如下所示:
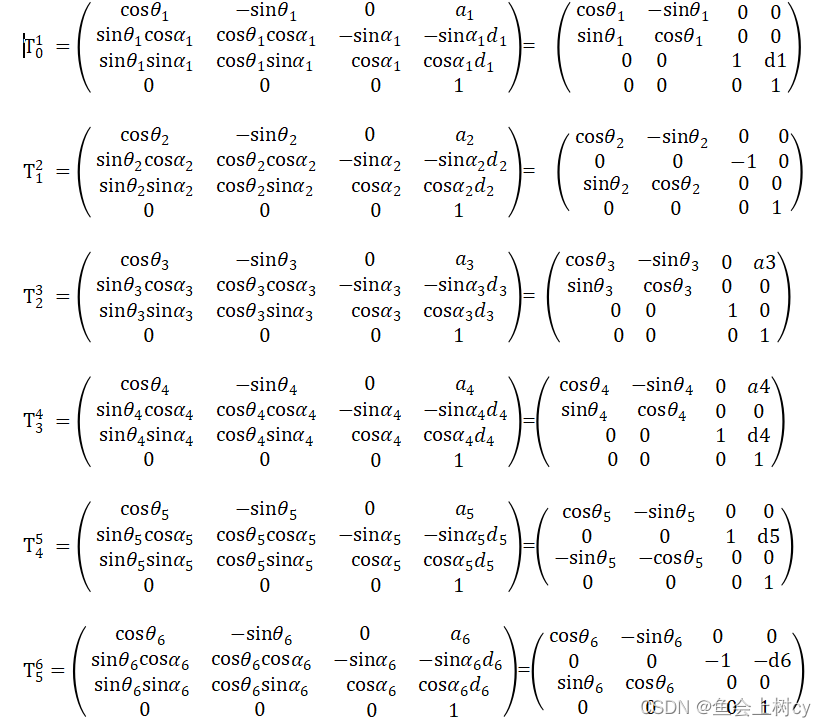
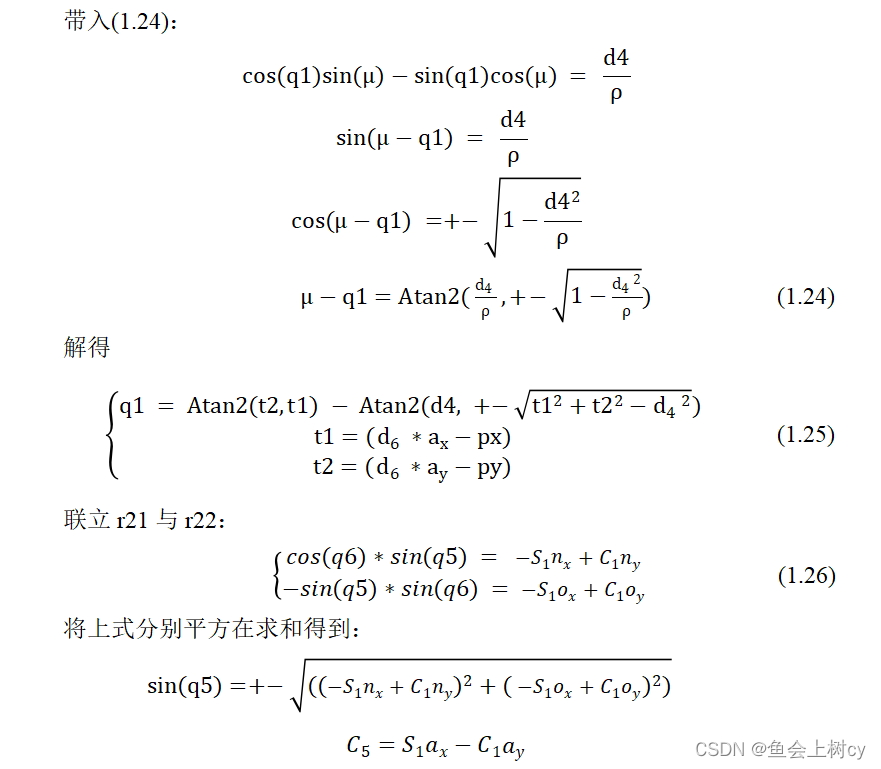
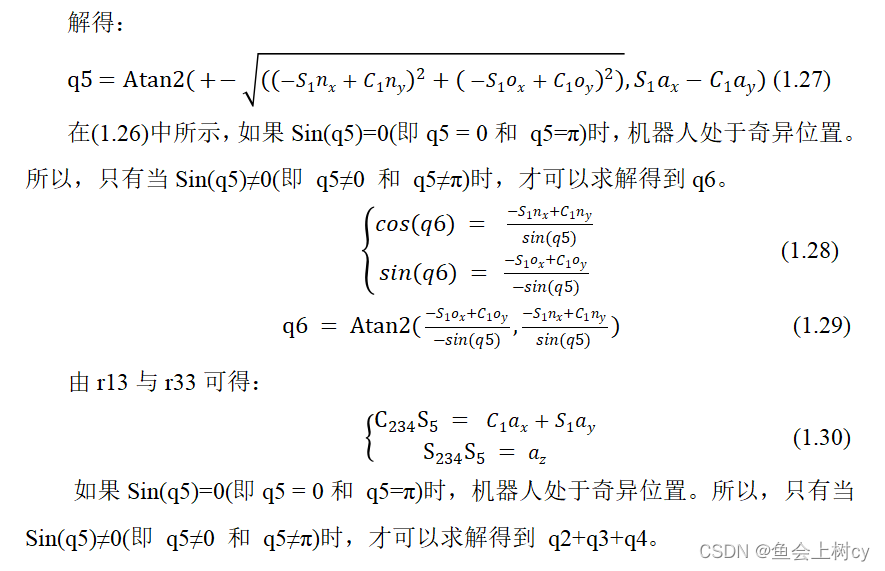
设
其中



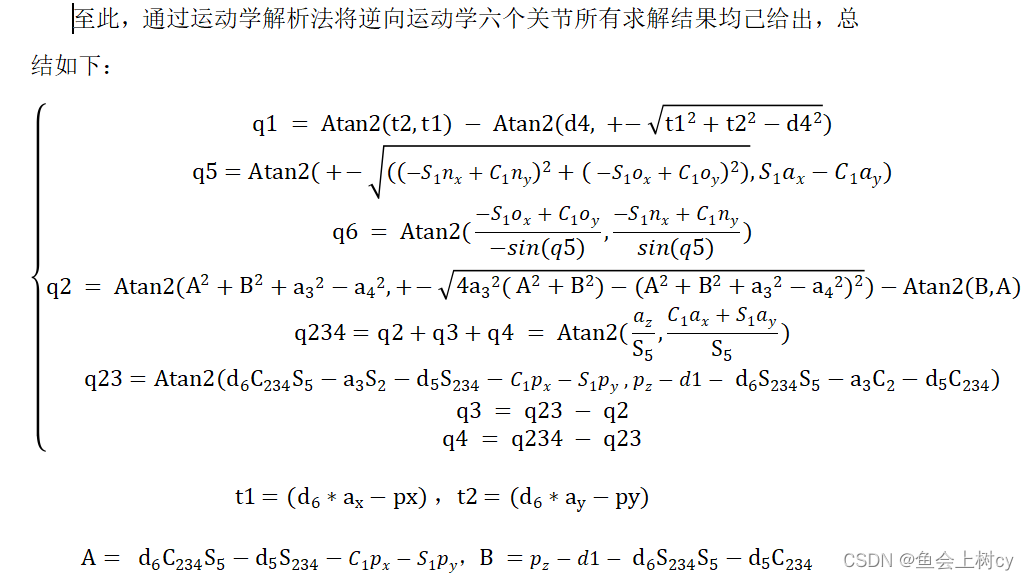

如果你的机械臂D-H参数结构和我的一致,以上解析解你可以直接使用,如果参数相差不大,可以跟着我的计算思路推导一下你自己的逆解方程,相信你也可以得到正确的结果。
MATLAB仿真验证
function R=AxisAngle_RotMat(Rxyz)
theta=(Rxyz(1)^2+Rxyz(2)^2+Rxyz(3)^2)^0.5;
if(abs(theta)
免责声明:我们致力于保护作者版权,注重分享,被刊用文章因无法核实真实出处,未能及时与作者取得联系,或有版权异议的,请联系管理员,我们会立即处理! 部分文章是来自自研大数据AI进行生成,内容摘自(百度百科,百度知道,头条百科,中国民法典,刑法,牛津词典,新华词典,汉语词典,国家院校,科普平台)等数据,内容仅供学习参考,不准确地方联系删除处理! 图片声明:本站部分配图来自人工智能系统AI生成,觅知网授权图片,PxHere摄影无版权图库和百度,360,搜狗等多加搜索引擎自动关键词搜索配图,如有侵权的图片,请第一时间联系我们,邮箱:ciyunidc@ciyunshuju.com。本站只作为美观性配图使用,无任何非法侵犯第三方意图,一切解释权归图片著作权方,本站不承担任何责任。如有恶意碰瓷者,必当奉陪到底严惩不贷!



