
OpenMV与STM32之间的通信(附源码)
温馨提示:这篇文章已超过447天没有更新,请注意相关的内容是否还可用!
本篇文章旨在记录我电赛期间使用openmv和stm32单片机之间进行串口通信,将openmv识别到的坐标传输给单片机。背景是基于2023年全国大学生电子设计大赛E题:舵机云台追踪识别。
单片机的串口通信原理我便不再详细讲解,下面直接上代码分析。
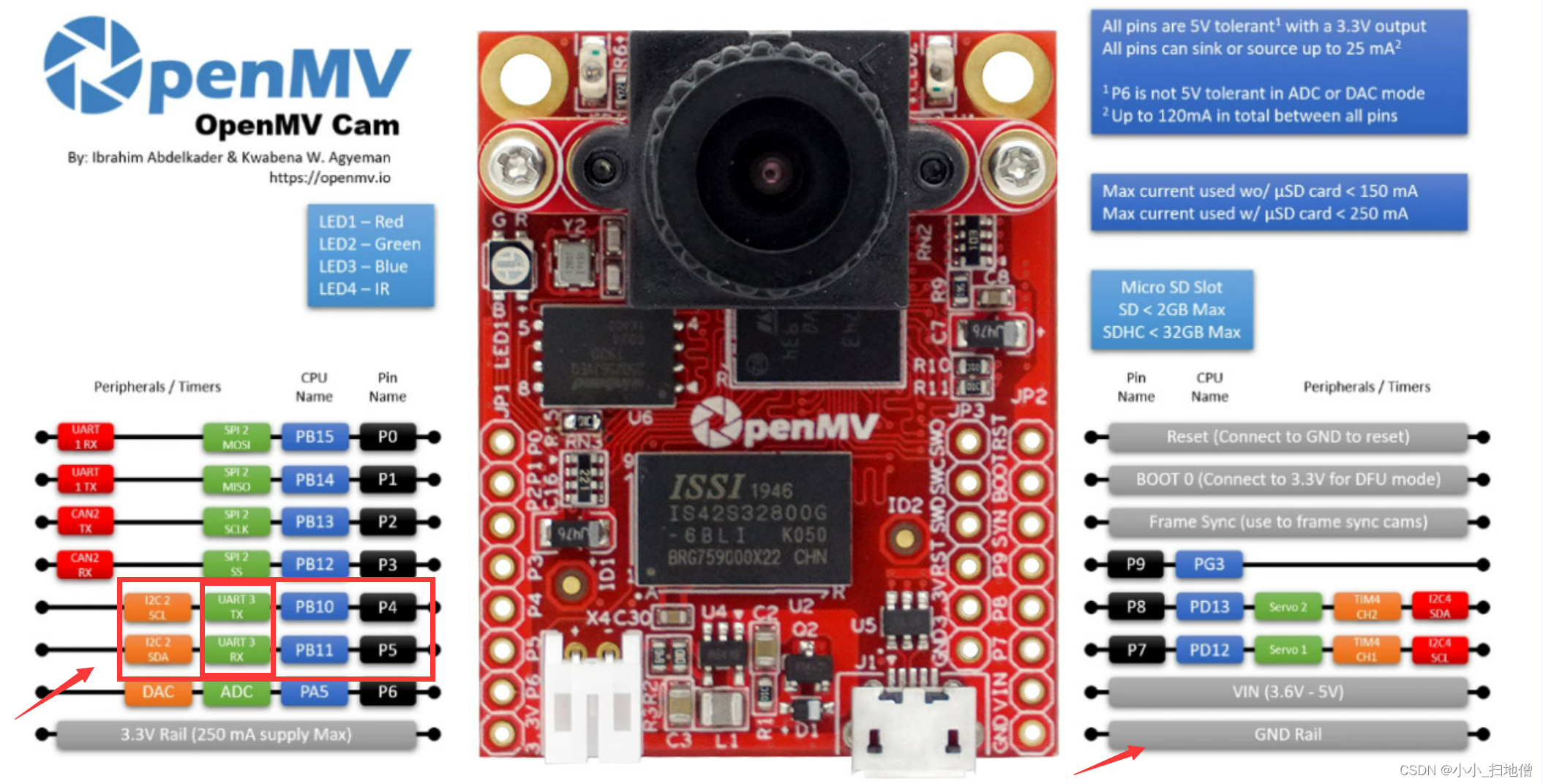
值得注意的是接线:RX——>TX
TX——>RX
单片机和OPENMV必须共地
非常重要!!!!
一、串口通信传输两个数据(x坐标和y坐标)
(一)、 OPENMV串口通信部分
import sensor, image, time,math,pyb
from pyb import UART,LED
import json
import ustruct
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
red_threshold_01=(10, 100, 127, 32, -43, 67)
clock = time.clock()
uart = UART(3,115200) #定义串口3变量
uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters
def find_max(blobs): #定义寻找色块面积最大的函数
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob=blob
max_size = blob.pixels()
return max_blob
def sending_data(cx,cy,cw,ch):
global uart;
#frame=[0x2C,18,cx%0xff,int(cx/0xff),cy%0xff,int(cy/0xff),0x5B];
#data = bytearray(frame)
data = ustruct.pack("
免责声明:我们致力于保护作者版权,注重分享,被刊用文章因无法核实真实出处,未能及时与作者取得联系,或有版权异议的,请联系管理员,我们会立即处理! 部分文章是来自自研大数据AI进行生成,内容摘自(百度百科,百度知道,头条百科,中国民法典,刑法,牛津词典,新华词典,汉语词典,国家院校,科普平台)等数据,内容仅供学习参考,不准确地方联系删除处理! 图片声明:本站部分配图来自人工智能系统AI生成,觅知网授权图片,PxHere摄影无版权图库和百度,360,搜狗等多加搜索引擎自动关键词搜索配图,如有侵权的图片,请第一时间联系我们,邮箱:ciyunidc@ciyunshuju.com。本站只作为美观性配图使用,无任何非法侵犯第三方意图,一切解释权归图片著作权方,本站不承担任何责任。如有恶意碰瓷者,必当奉陪到底严惩不贷!



